�z����ϴ�b��ϵ�yᘌ��������Y�����ׁG�����M�з�����
�z����ϴ�b��ϵ�yᘌ��������Y�����ׁG�����M�з����������B�Ƹ��к�������o�C����˾ᘌ��z����ϴ�������Y�����ׁG����Ȇ��},���Ƴ�һ�N�܉��Ԅәz�y�z��������돽���ԄӱO�y�b�á���,�����ɼ����z��D���M�ЈD��ƴ��,ȥ���؏Ͳ���;Ȼ����ûҶ�׃�Q���D��ƽ����һϵ���A̎���㷨ȥ��,ȥ���Y�ϻ���С�`��ָ�ĻҶȈD��ֵ��׃�Q���D���M�зָ�,�õ�Ŀ�����_�ķָ�D��;��,���ö�ֵ�D��ͶӰ׃�Q,�M���z��λ�ö�λ,�@���z��Ĕ�����ĥ�p��r�����ԇ�Y������,�㷨���кܺõČ��r�Ժ���Ч�ԡ�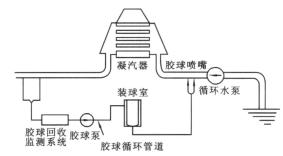
�ڰl��^����,�������ܱڳ��F�IJ�ͬ�̶��۹���Ӱ��������Q��,��əC�M��ս���,���Ӱl�ú�ġ�Ŀǰ,�����늏S��Ҫ�Dz��������Ը߉���ϴ���Y���M��̎��,���z����ϴ���������z����ϴ�b����������W���z��ݔ�ͱá��b���ҡ����������z���y�T��·�Ȳ����M�ɵ�,�������߉�ˮ�������Ì�������������s�܃ȏ����坍�z��D�^��s��,����s���M�з��Ͳ�ϴ,��ϴ��������s�܃��۹��������s�|,�Ķ����Ԍ��F���L��s��ʹ�É�������߰l늏S����Ч�桢���ϙC�M��ȫ�\�е�Ŀ�ġ����z����ϴ�b��ϵ�y�坍Ч���ܷ��_����,��ه���z���Ƿ��������z��돽�Ƿ������\���п��Ǵ����@���ǘӵ�ԭ������ϴ�^�����z��Ķ���,���F�G��F���������z��ĥ�p,�@��ֱ��Ӱ�����ϴЧ����Ŀǰ,����늏S�д��ö����˹��z��ķ����Д��Ƿ���Ҫ�����Q��,�M�r�M��,�`���^�����,�����늏S�Ľ���Ч���Լ��Ԅӻ�ˮƽ,�����_�l�����z���ԄӱO�yϵ�y��
ᘌ��z����ϴ�b��ϵ�y�z������ʵ͡������z�����z�y���y�Ȇ��},�����ѽ��Ѓɼ��о��C�������M�����о�:����˾�аl�����ù��w���������z���M��Ӌ�����z������ԄӱO�y��,���_�l������ˮ���ٶȵ�׃���z�y�ܵ��Ȳ���ϴ�̶ȵ��z����ϴЧ���O�y������ԭ�ȵ��z����ϴ�b��ϵ�y�M����һϵ�еăȲ��Cе����,���Ƴ��������z����ϴ�b��ϵ�y�z������ʻ������_����100%,������ڵĆ��}���ǟo���Ԅәz�y�z���ĥ�p�̶ȡ��ɼҹ�˾�ĮaƷ���҇����ǰ��������z����ϴ�b��ϵ�y���u,ُ�r���F��
�n�}Ŀ�������_�lһ�N�o����Qԭ�z����ϴ�b��ϵ�y,����ֱ�Ӹ�����ԭ�O���ϵ��z������ԄӱO�yϵ�y��
1�z������ԄӱO�yϵ�y��Ӳ�������Լ�ܛ���z�y��D
�ԄӱO�yϵ�yʾ��D��D1��ʾ��ԓϵ�y�����ԄӵرO�y�����z��Ĕ�������돽,�@���\���ˆT�Ϳ��Ը����z�y�Y���m�r�����ӻ���Q�z��,���C�z��Ĕ����Լ��|��,�����_���ѵ���ϴЧ����ͨ�^���ԇ�,�z��C�ļ���Чλ�ü��䷶�����Դ_��,���������ȳ������������c�x���˺��m�IJ��ϡ���ϵ�yӲ��������D2��ʾ,�������ܵ����Ϟ��T��䓡���W����,�ܵ��ȂȲ�ͬ�Ƕ��b���l�W��,�z��C�Ĕz�Ƕȴ�ֱ���ܷⲣ����,�Ĕz������{��
�D1�O�yϵ�y���bλ��ʾ��D
����ܛ��ģ�K���΄վ��Ǐ�һ���ڵ��B�m�D�����Ԅәz�y�������z��Ĕ�����ĥ�p�̶ȡ���ܛ���z�y��D��D3��ʾ����ͨ�^���I�z��C�ɼ��z���B�m�D��,�������r�g���惦;Ȼ�����ÈD��ƴ���㷨ȥ��ÿ�ɷ��B�m�D��֮�g���؏Ͳ���,���M�лҶ�׃�Q���D��ƽ����һϵ���A̎���^��ȥ��,ȥ�����û���С�`��ָ�ĻҶȈD��ֵ��׃�Q���D���M�зָ�,�õ�Ŀ�����_�ķָ�D��;��,�ڴ˻��A��,�M���z��λ�ö�λ,�@���z��Ĕ�����ĥ�p��r��
�D2�O�y�z����ϴ�b��ϵ�yӲ������ʾ��D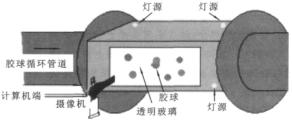
�D3ܛ���z�y��D
2�D��ƴ��
Ҫ��ӛ�ˮ��ѭ�hһ���ڃȵ������z��,��회���ˮ�������z����������Ӯ����M�ЈD��ɼ�,�鱣�C�D����B؞���c������,Ӳ�����ÈD��ɼ����ڞ�10cm��10cm,������ܛ�����Ĕz�l���O��40Hz���@���mȻ�܉��ψD��ȱʧ,��ͬ�r������B�m�ɷ��D��֮�g���λ�ÈD����؏͡����,����Ȍ�ÿ�ɷ��B�m�D���M�ЈD��ƴ��,���؏Ͳ���ȥ����
����ÿ�ɷ��D��ļ�ƴ��λ��,���IJ�ȡ��ƴ�ӷ�����:�������ăɷ��D�����,ǰһ�����ľ�������,�ͺ�һ�����ľ������������غϲ��ֵġ��ڱ�����,ͨ�^���ڴ�С�Լ��l�ʵļ��O��,ʹ���غϲ��ִȃH��η��D���1/10,�@�O��p����ƴ���㷨��ƥ����g,ͬ�rҲ�s����ƴ�ӕr�g�����,ƥ��rֻ����ǰһ���D����߅��1/10�Ŀ��g�ж��xһ������ģ��(��һ�����؞�����,�����Լ����x),�քeӋ���@��ģ�������������c�c��һ���D����������λ�õ������c��RGB���ƽ����,�õ���С���ǂ�ֵ�r�������c��λ��,�����ƥ��λ��,����ӛ���,����ǰһ���D����Ұ���c��һ���D��������M��ƴ�ӡ��@��ѭ�h�����ЈD��ȫ����v,�ҵ�ÿ�ɷ��D��ļ�ƥ��λ��,���ɵõ��]���؏Ͳ����B�m�����Ӯ��档
3�D���A̎��
3.1���ɫ�D�Q��ҶȈD
���ɫ�D�а������_224�N�ɫ,�y�ڌ�ʩ����,����ͨ�������D��ҶȈD�������ɫ�D�ҶȻ����S���,���б��^���õķ�����ƽ��ֵ������ֵ�����ә෨�͆�ɫ����
ƽ��ֵ��,���nj��D���R��G��Bֵ��ƽ��,Ȼ��ƽ��ֵ����ҶȈD�ĻҶ�ֵ;��ֵ��,����������R��G��Bֵ�Ĵ�ֵ,�����ֵ����ҶȈD�ĻҶ�ֵ;��ɫֵ��,���nj��D���R��G��Bֵ���κ�һ��ֵ����ҶȈD�ĻҶ�ֵ��
��Ȼ���е������ɫ�������ɼt(R)�G(G)�{(B)��ԭɫ�M�϶���,RGBɫ��ϵ�y��ͨ�^��R��G��B�@���N�ɫ��Ӯa�������ɫ,�dz��õ��ɫϵ�y��YUV�DZ��W���ҕϵ�y���õ�һ�N�ɫ���a����(����PAL)�����С�Y����ʾ������(lumi2nance��Luma),���Ҷ�ֵ;����U���͡�V����ʾ�Ąt��ɫ��(ChrominanceChroma),����������Ӱ��ɫ�ʼ�Ͷ�,����ָ�����ص��ɫ�������ȡ���ͨ�^RGBݔ����̖�턓����,�����nj�RGB��̖���ض����֯B�ӵ�һ��YUV�cRGB��ֵ֮�g�����������Pϵ:0.229-0.1480.615[Y,U,V]=[R,G,B]0.587-0.289-0.5150.1140.437-0.100Y�����ˈD��ĻҶ�ֵ,U,V����ɫ��ֵ,��Y�����܉��ʾ�������c�ĻҶ�ֵ,��:Y=R��0.299+G��0.587+B��0.114(1)��ʽ(1),�����D���R��G��Bֵ���Yֵ,Ȼ�������c��R��G��Bֵ���xֵ��Y,���܌����ɫ�D�D�Q�ɻҶȈD���D4���\�ô˷��D�Q�ɵĻҶȈD��
�D4���ɫ�D�Q��ҶȈD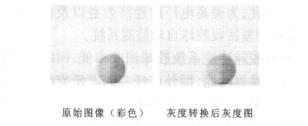
3.2�D��ƽ��
�D��ƽ����Ҫ�Ǟ����������������������������ܿ���Ҋ��ʧ���׃��,��Щ��ֻ�����M�ЈD��̎��r�ſ��l�F������ȥ����,�б�Ҫ���D���M��ƽ��,���Բ��õ�ͨ�V���ķ���ȥ�����l�ɔ_���D��ƽ�����������l�ɴ��,�ڿ�����,�D��ƽ���ij��÷����Dz��þ�ֵ�V������ֵ�V����
ᘌ�ˮ�����z��D������c,���IJ����˾�ֵ�V��,������һ�����攵�c�Ļ��Ӵ��ھ���ڈD���ϻ���,�����������c�����ĈD�������c�ĻҶ�ֵ�ô��ڃȵĸ����c�ĻҶ�ֵ��ƽ��ֵ���档���ٶ�һ��1��1�����صĈD��f(x,y),ƽ��̎����õ�һ���D��g(x,y),g(x,y)��ʽ(2)�Q��:g(x,y)=(m,Sf(m,n)(2)����:x,y=0,1,2,��,l-1;S��(x,y)�c�������c�����˵ļ���;M�Ǽ��σ����˵Ŀ�����ʽ(2)�f��,ƽ�����ĈD��g(x,y)�е�ÿ�����صĻҶ�ֵ���ɰ�����(x,y)���A�������е�f(x,y)�Ďׂ����صĻҶ�ֵ��ƽ��ֵ���_�������IJ��õ���һ��3��3�����ڡ�
����,Ҫע��һ�c,���ô��ڒ���D���^����,���ڈD���4��߅���������c,�M��������̎��,��t,߅����Ҳ�������Y������^��Ӱ푡�ƽ���Y����D5��ʾ��
�D5�D��ƽ���Y��
4����С�`��ָ�ĻҶȈD��ֵ��׃�Q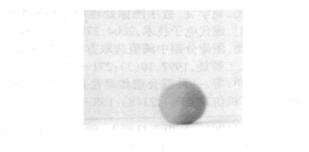
�ҶȈD�Ķ�ֵ��׃�Q���nj�һ���ҶȈD�D�Q�ɺڰ�ֵ�D���w��������ָ��һ���ֵ,����D����ij���صĻҶ�ֵС��ԓ�ֵ,�tԓ���صĻҶ�ֵ�O�Þ�0(��),��t�O��255(��)��׃�Q�������_ʽ����0(x<T)255(x��T)����T��ָ�����ֵ���ֵ�xȡ�LjD��̎���еĻ������},��ֱ��Ӱ푈D��Ŀ���R�e��ۙ����Ҫ�n�}֮һ��������W��ᘌ��@һ�n�}�M���ˏV��������о�,����ܶ��ֵ�xȡ����������С�`�,��Ŀ�˴�С����Ӱ�С,��СĿ�ˈD���Ծ��кõķָ�Ч��,��һ�N��Փ���ܡ�Ч���^�ѵ��ֵ�xȡ������
���ĸ����z����ϴ�b���z��D������c,������С�`��ָ��㷨�M���ݶȈD��ָ
��С�`���ȡ���ֵt��Ӌ�㹫ʽ����:J(t)=1+2��[p0(t)ln��0(t)+p1(t)ln��1(t)]-2��[p0(t)lnp0(t)+p(t)lnp1(t)](3)ʽ(3)��Ӌ��D��ѷָ��ֵ���Д��ʄt����,����ʾ��С�e�`�ָ���ʵĆ��}������:tmaxp0(t)=i=h(i),p1(t)=i=h(i),���Ęӱ�����;ti=[i-��0(t)]2h(i)p0(t),maxi=[i-��p1(t)���ӱ��ķ���;i=h(i)��ip0(t),maxi��ip1(t),���ӱ��ķֲ���ֵ��
ͨ�^ѭ�hӋ��ÿ��tֵ������J(t),�����ҳ�J(t)Сֵ������t,��ָ�ļ��ֵ��
t3=Arg,t,)l}(����256���ҶȈD,l=255)
(a)�˞��Ӌ�ֵ�ָ��(b)С�`��ֵ�ָ�
�D6�D��ָ��Ķ�ֵ�D��
�ɈD6�ɷN̎���Y����֪:����С�`��ָ��㷨�@�õĶ�ֵ���D��Ч�����á�
5�z��λ�ö�λ
������֪,���l�����D��̎���Y���������P��Ҫ��Ӱ푡����b�ڴ�,���b���ڷ��]�ܵ��ȂȲ�ͬ�Ƕ�������һ���������l�W��,�@��Ч�ر����˹��ղ�������������F���Լ��D�����Ӱ�ij��F���ڵõ��ָ��Ķ�ֵ���D��Ļ��A��,����ˮƽ/��ֱͶӰ׃�Q���Ɍ��F�z���߅�綨λ�������^ˮƽ/��ֱͶӰ׃�Q���nj��D���ij��(��ij��)ͶӰ��ˮƽ(��ֱ)�S,��ԓ��(��)�ĺ��c(����c)��Ŀ�ۼ��������@�������Ҫ,��ÿһ�����صĺ��c�����ۼӵõ��D����ˮƽ�����Ϻ������c�ķֲ�����,�����������c�ķֲ�,���_���z�������߅�������߅��,�Ķ��@���z��Ĕ����Լ��돽����λ�Y����D7��ʾ��
�D7�z��λ�ýK��λ�Y��
�ڷ��挍��_��,��300���ӱ���(���а���280�������,20���Ɠp��)�M��ѭ�h�O�y,����C��,���z��O�yϵ�y�܉���١��ʴ_���Дಢ�@ʾ�����z��Ĕ�����ĥ�p�̶�,�ʴ_�ʴ���99.5%;�ڔ�������ó̶ȵ���Ҏ���ֵ�r,�܉�o���Ԅӈ���̖;����,���Кvʷӛ�,���㹤���ˆT��醡�
�S������늏S�Ј����ļ���,���ܽ��Ĺ������Mһ���_չ,�z����ϴ�b��ϵ�y�Ĺ��ܮaƷ����Խ��Խ��ʢ������������ϴ�z������ԄӱO�yϵ�y��ʹ��,�����@����߰l늙C�M�����,��Ч�p����݆�C�����pʧ,������݆�C�������ʡ�
���ڇ���һֱ�]�д�aƷ,�����M�ڮaƷ�r���F,���҇��˾���dz������u,����늏S���ò��Q����δ��ȫʧЧ���z����ϴ�b��ϵ�y,����˘O����YԴ���M�����ñ��aƷ�rֻ������ԭ�z����ϴ�b��ϵ�y�ĸ���ϵ�yʹ��,�������YԴ���M,���p�����Y��

